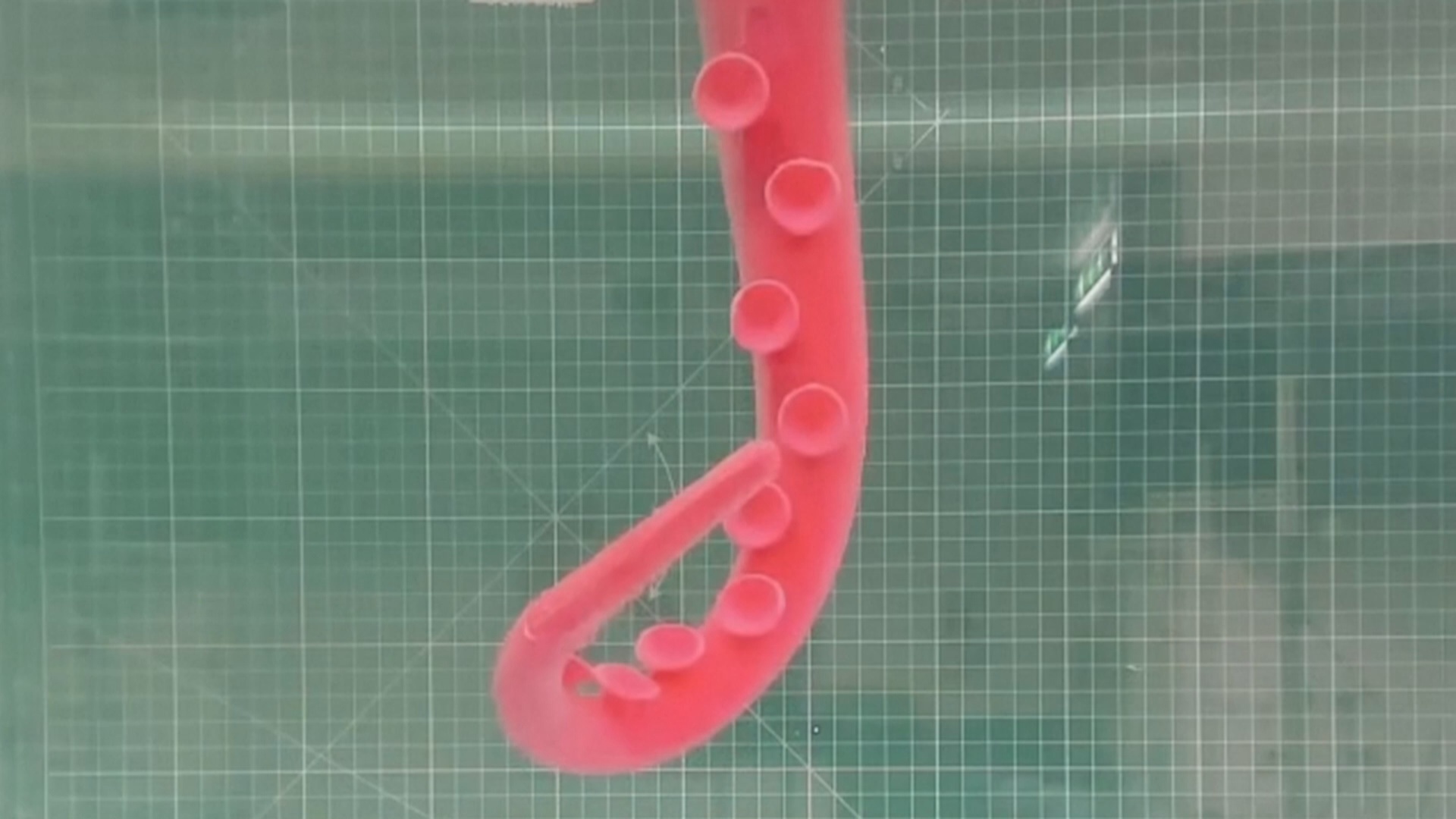






Прототип створили в Італійському інституті технологій у Генуї. Він має замінити більш жорсткі маніпулятори для роботи у важкодоступних місцях.
Силіконові присоски мають мініатюрні датчики. Під час контакту з об’єктом форма присоски змінюється. Це дає змогу системі оцінювати силу та напрямок впливу.
[Барбара Маццолаї, заступник директора з робототехніки]:
«Ми запропонували нову версію м’якої роботизованої руки, натхненої восьминогом. Зокрема, нас надихнула здатність цих тварин досліджувати довколишнє середовище за допомогою чутливих присосок, розпізнавати різні об’єкти та взаємодіяти з різними типами середовища».
За словами розробників, рука здатна вловлювати слабкі сигнали дотику та працювати як у повітрі, так і під водою. Модульна конструкція дає змогу змінювати кількість та розташування присосок залежно від завдання.
[Барбара Маццолаї, заступник директора з робототехніки]:
«Цей робот дуже м’який та адаптивний, як природна система. Він здатний пристосовуватися навіть до сильно обмеженого простору, діставати об’єкти різної форми та ваги й змінювати свою форму та поведінку залежно від зовнішнього середовища».
Серед можливих сфер застосування розробники називають підводні операції та роботу в складних умовах, де традиційні жорсткі роботи стикаються з обмеженнями. Наступний етап досліджень буде присвячено розширенню набору предметів, які зможе захоплювати пристрій.
Дослідники також працюють над тим, щоб знизити енергоспоживання та обчислювальне навантаження системи. Це дасть змогу роботам довше та безпечніше працювати у природному середовищі.
Коротке посилання на цю сторінку: