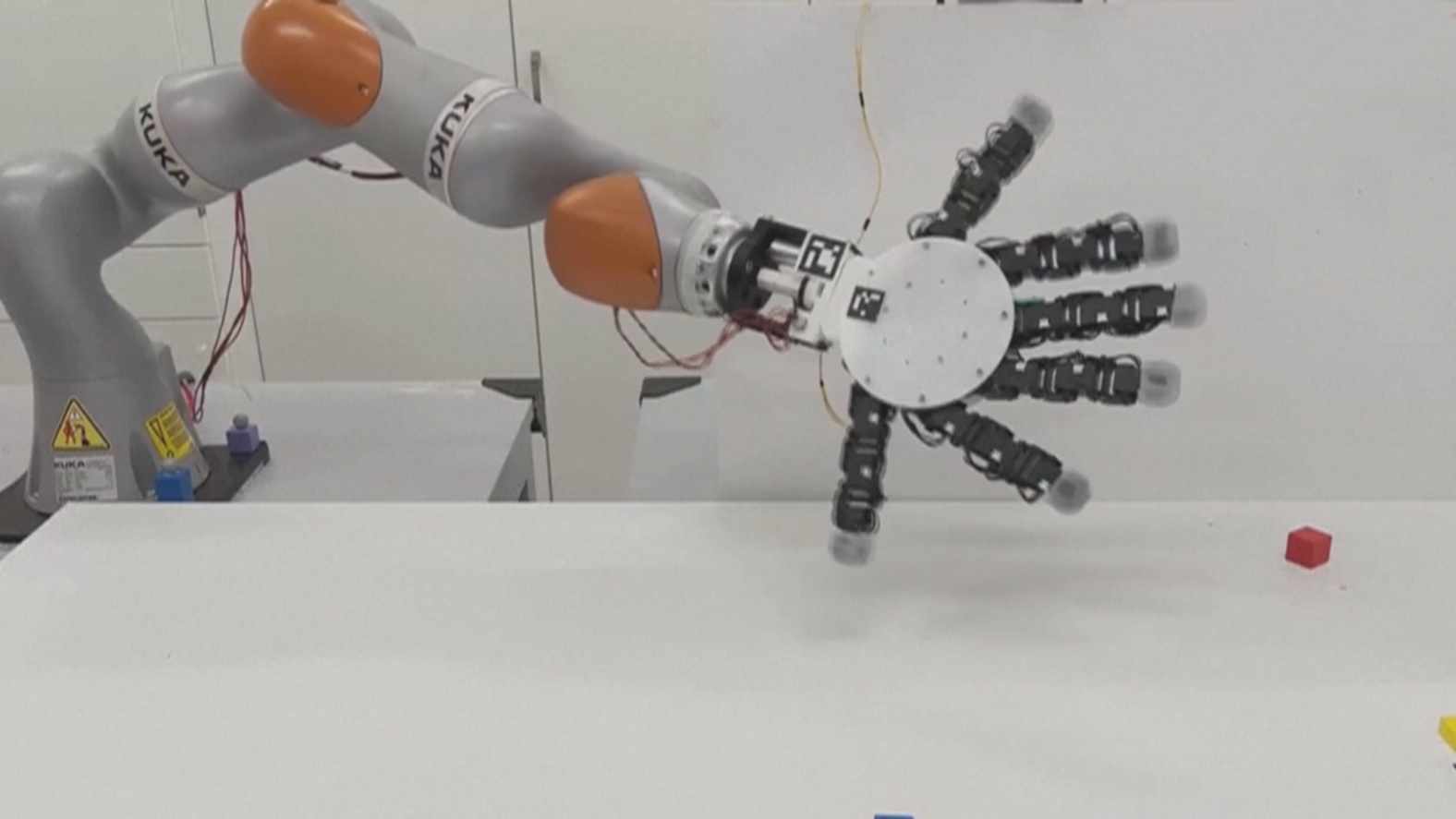







У Великій Британії розробили пристрій, який може повзати, захоплювати предмети, а потім знову прикріплюватися до роботизованої руки.
[Куннен Яо, розробник]:
«Ми вважаємо, що людська рука не ідеальна. Насправді людські руки мають багато обмежень. Вони позбавлені симетрії й можуть виконувати лише обмежену кількість завдань через свою структуру, обмеження та особливості. А що якщо ми зможемо зняти ці обмеження і зробити роботизовану руку спритнішою, яка перевершуватиме функціональність людської руки? Гадаю, в цьому й полягає ідея нашого проєкту й проблема, яку ми хотіли розв’язати».
Одне з головних обмежень, за словами команди, полягає в тому, що людські руки використовують лише один великий палець і можуть захоплювати предмети лише з одного боку.
[Вуд Біллард, розробник]:
«Чому має бути лише один великий палець? А якби їх було два чи більше, або будь-який із пальців міг би бути великим пальцем? Якщо всі пальці потенційно є великими пальцями або великим і вказівним пальцями, можна створити безліч пар. Це дасть змогу, наприклад, захоплювати предмети лише цими двома пальцями».
Дослідники розробили дві версії руки: одну з п’ятьма пальцями та одну з шістьма. Обидві моделі мають симетричну конструкцію, що дає змогу захоплювати предмети з будь-якого боку долоні.
Під час випробувань роботизована рука змогла відокремитись від руки, повзати й послідовно та надійно захоплювати до трьох предметів, перш ніж прикріпитися назад.
Команда дослідників заявляє, що в майбутньому таку технологію можна буде застосовувати в рятувальних операціях. Зокрема в замкнутих просторах. Так, роботизована рука зможе проникати в трубопроводи та перевіряти приміщення на наявність проблем чи перешкод.
Коротке посилання на цю сторінку: